
�C�������S���
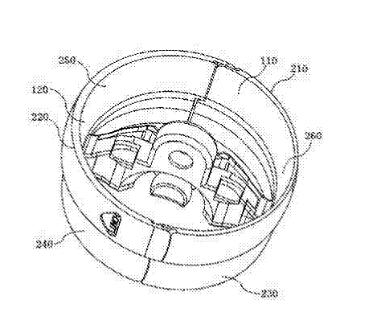
1.һ�N�C�����m�S��朣�����������:�ɶ��朹��B�Ӷ��ɣ�������朹����w���A�h�Σ����^���д�����ƽ���֞���朹�����朹���������朹�����朹��ăɶ��ڷָ�̎���ӣ�
��朹������O��һ�M����ӵĿ�ɮ�Ϳ��ۣ��������ۺͿ��۵�һ�˷քe�̶�����朹��ȱ��в�����朹��ȱ��в�.�����в��O��һ�������B�ӿڣ����۲����в��O��һ���B�����������B�������c���·���朹��е��������B�ӿ������B��;
������朹������Ȼ�����⻡�棬������朹��������⻡������g����߅��ĝu׃�Y����
��朹����²��ߴ�С���ϲ��ߴ磬�Ҷ�����朹��B�ӕr���Ϸ���朹���һ����λ���·���朹��ȣ��c�·���朹������^ӯ��ϡ�
2.��������Ҫ��1�����ęC�������S��朣�����������:������朹��֞����ϲ���������朹��֞����ϲ����Ҳ���.�������ϲ����⻡�����g����߅��ĝu׃�Y�������ϲ����Ҳ������.���²������²���ӣ������朹��B�ӕr����һ���Ć�朹������²������²���һ����λ����һ����朹��������Ҳ����ȣ����^ӯ��ϡ�
3.��������Ҫ��1�����ęC���ˇ@�S��朣�����������:������朹�����朹��Ĵ�Ӻ��̎�ĺ���c��朹��܇����һ�¡�
4.��������Ҫ��1�����ęC�������S��朣�����������:������朹��϶��������Ȧ���Ϧ��Ȧ�棬�����������B�ӿ��c������朹��ă�Ȧ��ͬ�ġ�
- ��һƪ����X������a��I���� 2016/4/5
- ��һƪ���������ܸ�����X��朵����� 2016/3/24